Project Management
The UAA Robotics Team is committed to creating a culture of collaboration.
Each team meeting is centered around a task structure.
Tasks are posted by the team leads so members can choose which tasks they can tackle.
This system opens the door for students to explore other disciplines, while also providing communication on what tasks need to be completed.
Implementing tasks ensures we are using our team members' time effectively and efficiently.
Team members can come to our meetings, help complete a specific task, and know that they had a direct impact on our team.
Additionally, this task structure naturally leads to documentation.
Each task includes a section for taking notes and recording the outcome.
The main role of leads on our team is to create tasks and make sure they are documented properly.
We have done this because we understand the importance of documentation in team communication.
We need to have a clear trail of our thoughts and actions as we develop robots and win competitions.
This ensures that future UAA Robotics Teams have the ability to read our documentation, and build upon what we have learned.
Documenting also allows us to better learn from any mistakes that we make.
Such emphasis on documentation and learning from our mistakes will lead to a sustainable and interactive program for the future team.
VEX U Competition
Fall 2022-Spring 2023
VEX U requires us to design, build, and program robots to compete in challenge matches. It is a competitive competition that includes 300+ teams from across the world. In-person competitions require travel across the continental US. Rankings from these competitions will determine if we make it to the World Championship competition. For the competition, we design two robots to compete in three minute challenge matches. The challenges change each year.
-
Alaska Live Remote Skills CompetitionResults: Ranked #10 in the World!
-
Tigertown Throwdown TournamentResults: Placed #4 out of 16 registered teams and won Judges Award!
-
VEX Robotics World ChampionshipResults: Ranked 28th out of 50 in our division and won the Girl Powered Challenge!
Robot Design
For the 2022-2023 Spin Up Challenge, we have to design 2 robots, one less than 15”x15”x15” and the other less then 18”x18”x18”.
Our robot needs to be able to quickly and efficiently score points by shooting disks (majority of the points),
owning rollers, and expanding during the last 10 seconds of a match (see video above for more details).
We can use VEX materials or fabricate our own.
After careful consideration, we went with a front load and back shoot of disks.
Disks are taken in by a vertical track, stored in a hopper, and shot with a flywheel.
The robots turn rollers with a wheel at the front and expands by shooting string onto the field.
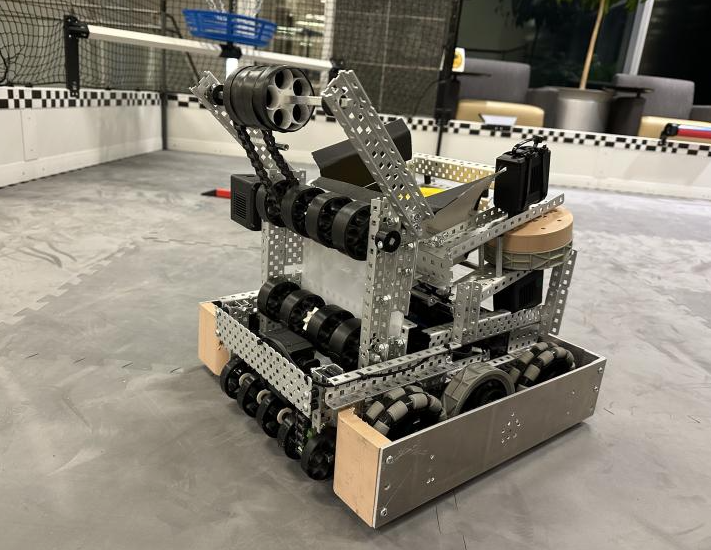
This is the front of the robot with a vertical disk intake system.
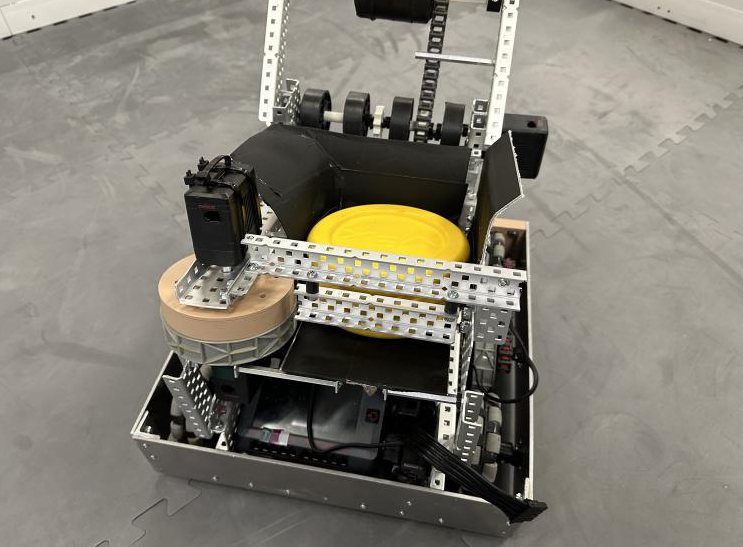
This is the back of the robot where the disks are stored and shot with a flywheel.
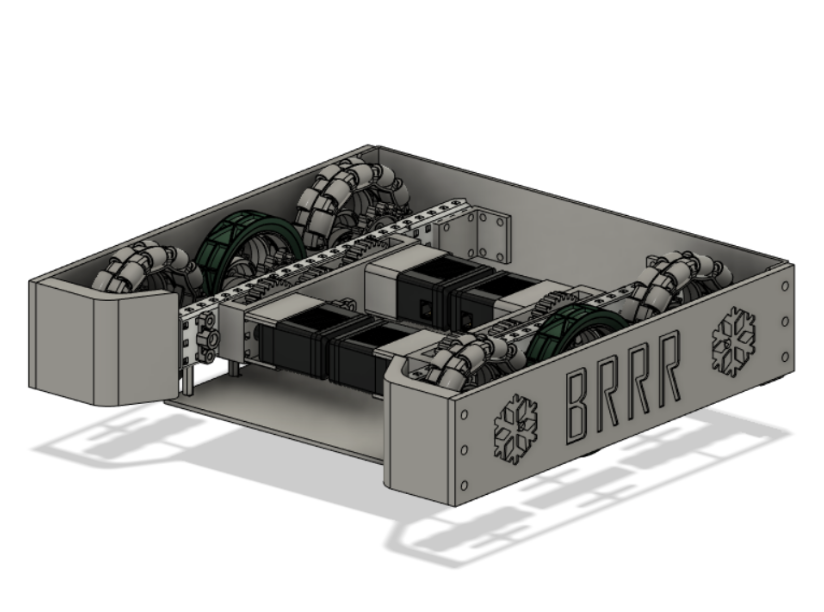
This is the the Fusion 360 CAD of our drive train.
Programming
Matches consist of a 45 second autonomous period and a 1:15 minute driver controlled period. We need to be able to control the robots driving, intake of disks, and shooting with the controller to be used during the driver controlled period. Repeated feedback from the mechanical team and the designated drivers makes this as efficient as possible. We also need to have a program to handle robot motor controls for the automation phase that depends on input from vision sensor, gyro direction sensor, etc.
CoffeeBot Project
Spring 2023-Spring 2024
We’ve all just come out of a pandemic - tell me, was getting your daily cup of coffee an anxiety-inducing exercise in social distancing?
Have you ever been so sleepy in the morning that the chipper Starbucks barista induces unmitigated frustration?
Do you just dislike people but love coffee? Well, we have a solution for you - the UAA CoffeeBot!
Of course we’re being tongue-and-cheek, but we are working on a real robot that can do a real job in the real world.
The CoffeeBot Project aims to build a fully autonomous robotic arm which serves coffee in the 2nd Floor Cafe of the Engineering Industry Building (EIB) at UAA.
This cafe has been vacant since the pandemic began and our robot will eventually be able to autonomously serve students, faculty, and the community with delicious coffee.
Not only that, we expect it to eventually make money which will help fund future projects the club has in mind.
Passive profit from the CoffeeBot means more projects for the club which means further opportunities for club members gain to hands-on experience that is applicable to their future career course.
Additionally, more robotics projects means more exposure for the club and the UAA, which encourages community involvement.
Robot Design
The robotic arm will consist of three different major components, the base, the arm structure, and the claw. Each component will have its own detailed design process consisting of solidworks modeling and in lab prototyping.

We created a 6-DOF 3D printed Minimal Viable CoffeeBot, before we move onto the full model.
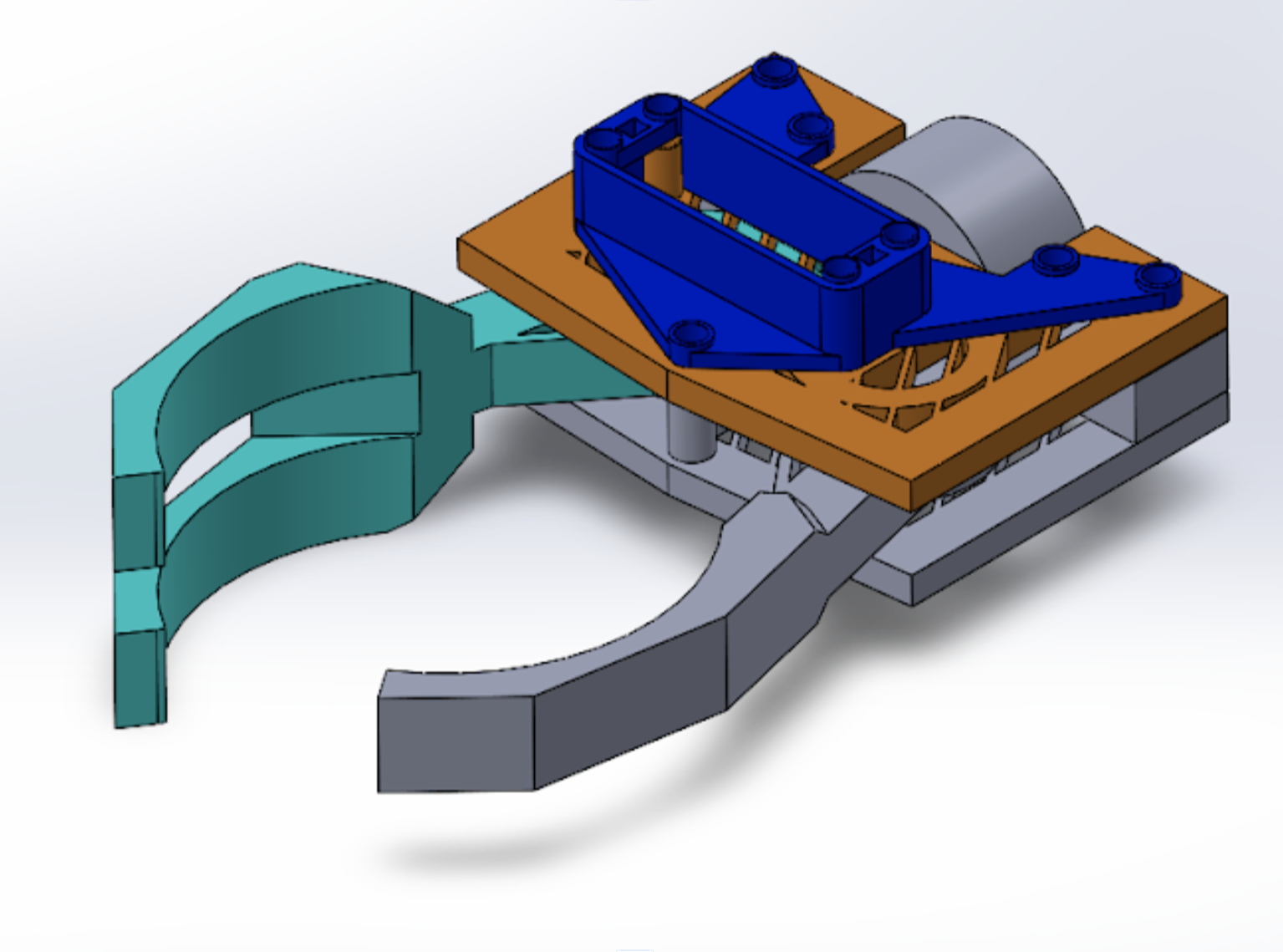
This is the first claw design used in our MVC.
Programming
We want the CoffeeBot to be fully autonomous. That means that we will be incorporating wireless payment options to trigger the bot to deploy. We will also eventually introduce Machine Learning to the robot to perform actions such as voice recognition/communication, efficient scheduling, path inference, and more. This will all ensure that the user experience will be made intuitive, convenient, and memorable.
Website created by the 2022/2023 UAA Robotics Programming Team